
Plastik in den Ozeanen ist mittlerweile als eine große ökologische Herausforderung in der breiten Öffentlichkeit angekommen. Bilder von riesigen schwimmenden Müllfeldern und Tieren, die unter dem alltäglichen, nicht biologisch abbaubaren Abfall leiden, haben, wenn auch nicht zu einer grundsätzlichen Kehrtwende beim Plastikkonsum, so doch zu einigen ehrgeizigen Projekten geführt. Das Projekt The Ocean Cleanup zielt beispielsweise darauf ab, die Meeresoberfläche mit riesigen schwimmenden Barrieren zu reinigen.
Dies betrifft allerdings nur einen Teil des Plastiks im Meer – den an der Oberfläche schwimmenden Abfall. Bis zu 70 Prozent des Plastiks im Meer sinken auf den Meeresboden, wo es sich in Pflanzen, Korallen und Felsformationen verheddert. Wenn der Kunststoff hier festsitzt, ist er wesentlich schwerer zu erreichen und zu entfernen.
Um dieses Problem zu lösen, haben sich Roboterforschende des Max-Planck-Instituts für Intelligente Systeme in Stuttgart Rat bei den wahren Meeresexperten geholt – der Natur selbst. Das Ergebnis ist ein quallenähnlicher Roboter, der sich in komplexen Umgebungen zurechtfindet und kleinere Plastikabfälle entfernen kann, ohne sie überhaupt berühren zu müssen.
Der Roboter, der in Zusammenarbeit mit den Abteilungen Physikalische Intelligenz und Robotische Materialien des Max-Planck-Instituts entstand, besteht aus elektrohydraulischen Aktoren, die die Muskeln und Bewegungen von Quallen nachahmen können. Diese flüssigkeitsgefüllten künstlichen Muskeln, die so genannten HASELs, sind in eine Reihe von Polymerschichten eingebettet, die quasi als Haut für den Roboter fungieren. Wenn eine Spannung an die in die HASELs eingebetteten Elektroden angelegt wird, wird die Flüssigkeit im Inneren hin- und hergeschoben, wodurch sich die HASELs – ähnlich wie ein echter Muskel – zusammenziehen und entspannen. Dadurch entsteht eine Bewegung, die es dem Jellyfish-Bot ermöglicht, in seiner Umgebung zu navigieren und sich vertikal und horizontal zu bewegen.
Dies sorgt nicht nur für den Antrieb, sondern erzeugt auch eine Strömung unter dem Jellyfish-Bot, die Objekte vom Meeresboden ansaugt. Echte Quallen nutzen dies, um Nährstoffe aufzufangen, aber die gleichen Prinzipien können auch zum Anheben kleinerer Plastikabfälle angewendet werden. Mit diesem Verfahren hofft das Team, in Zukunft Plastikmüll an die Oberfläche befördern zu können, wo er dann aufgefangen und recycelt wird.
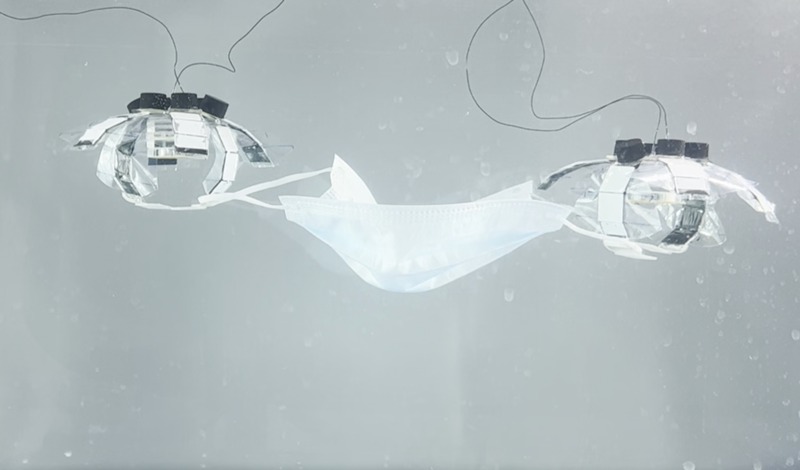
Bei größeren Abfallstücken können die „Arme“ des Jellyfish-Bots auch zum Greifen und Tragen verwendet werden. Die Entwickler*innen experimentieren sogar mit Teams von Jellyfish-Bots, die schwerere oder komplexere Abfallstücke gemeinsam bergen können.
Die künstliche Qualle kann mehr als Plastikmüll sammeln
Es ist nicht das erste Mal, dass Roboter eingesetzt werden, um das Problem des Unterwassermülls zu lösen, aber das Max-Planck-Team weist darauf hin, dass ihr Ansatz erhebliche Vorteile gegenüber anderen hat. Erstens ist ihr Roboter nicht so groß, schwerfällig oder starr wie andere Wasserroboter, so dass er auch in komplexere Gegenden und Ökosysteme vordringen kann. Darüber hinaus ist der Jellyfish-Bot durch den Verzicht auf Propeller und andere traditionelle Formen des Unterwasserantriebs auch wesentlich leiser als seine Alternativen. Das Team geht davon aus, dass die Geräusche des Quallen-Roboters nicht von den Hintergrundgeräuschen des Ozeans zu unterscheiden sind, was die Auswirkungen auf die Meeresfauna und -flora verringert.
Das Polymer, das den Roboter schützt, ist auch für Menschen und Fische ungefährlich, wenn es durchstochen wird, und die geringe Strömung, die im Jellyfish-Bot verwendet wird, stellt ebenfalls kaum ein Risiko dar. Mit der Fähigkeit, Objekte zu sammeln, ohne sie zu berühren, könnte der Jellyfish-Bot auch andere Aufgaben übernehmen, zum Beispiel empfindliche Fischeier oder andere biologische Proben für die Überwachung der Umwelt und der biologischen Vielfalt einsammeln.
Allerdings räumt das Team ein, dass der Jellyfish-Bot in seiner jetzigen Form einen entscheidenden Nachteil hat. Derzeit wird er über ein Kabel mit Strom versorgt und gesteuert, was seine Reichweite und Praxistauglichkeit in natürlichen Umgebungen erheblich einschränkt. Die Entwickler*innen experimentieren derzeit daher mit einer drahtlosen Steuerung und Stromversorgung und haben bereits ein Modell entwickelt, das ohne Kabel vertikal schwimmen kann.







